



NORBIT社正規総代理店
Ping DSP社正規総代理店


マルチビーム測深器(NORBIT)、AUV、超音波ドップラー式多層流向流速計(ADCP)等の海洋観測機器、測定機器及び部品の輸入販売、保守、サービス、ソフト開発、コンサルティング。

3DSS-Multi Angle Swath Bathymetry Sonar
![]()


3DSS TM Multi Angle Swath Bathymetry Sonarは、PingDSP社が開発した次世代の軽量コンパクトかつ高精度の浅海用3Dスワス音響測深システムです。 ソナー重量8kgという取扱い易さが、小型ボートによる河川, ダム, 河口域, 港湾等における海底地形ならびに構造物調査において最高レベルの作業効率性を提供します。
一般的なインターフェロメトリスワス音響測深器は、浅海域の海底地形を効率良く測量できる反面、水中構造物や海底地形など複数の異なる方向から同時に受信したエコーの到来角度の分別が困難なため、複雑な立体構造を高解像度で把握できないという欠点がありました。
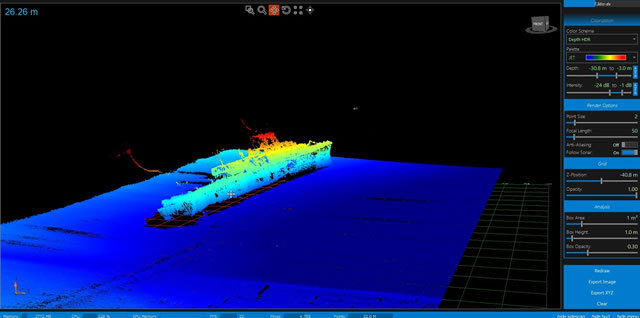
PingDSP社が特許を持つCAATI TM (Computed Arrival Angle Transient Imaging)アルゴリズムを始め、ECOHS TM, FlexBAT TM, Point4 TM, SoftSonar Rといった最先端の信号処理および音響測深技術を基に設計された3DSS TM Multi Angle Bathymetry Sonarは、最大7種類の異なる角度から同時に到来した目標物のエコーを正しく識別でき、それらの高精度測深データおよび超高解像度の画像データを出力します。取得されたすべての画像データは測深情報を持つことから、水面下の状態を真の3D画像としてリアルタイムに表示できます。
ECOHS ™: Enhanced Coherent Sidescan beamforming
FlexBAT ™: Flexible Broadband Array Transmitter technology
Point4 ™: Real-time 4D point cloud display software
SoftSonar ®: Leading edge electronics technology
特徴
- 水深の3~7倍のスワス幅で測深データを取得
- IHO SP-44適合
- 可変ビーム角で直下データ不足を解消
- 小型軽量ソナー(ソナー重量9kg)で小型船舶に容易に取り付け
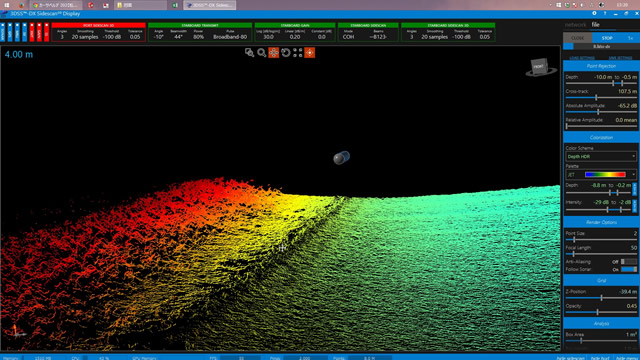
- 測深データ、2Dサイドスキャンデータに加え3Dサイドスキャンデータを表示
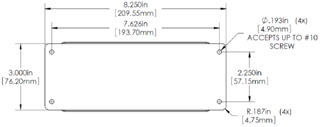
Size




Bathymetry/深浅測量
今まで取得できなかった直下データを発射ビーム角を変更する事で解消致しました。 トランスデューサの取り付け位置を変える事なく、ソフトウェア上で上下にビームを振る事が出来るため直下データの不足を解消しました。 またIHO SP-44に適合しております。
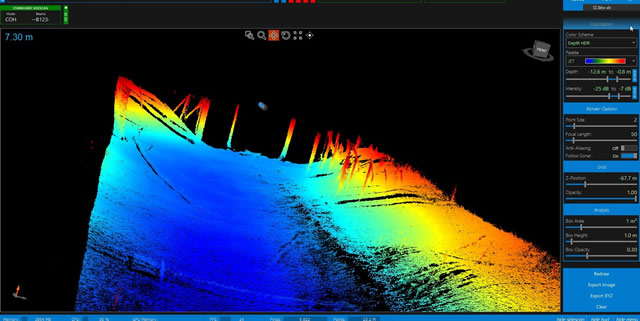
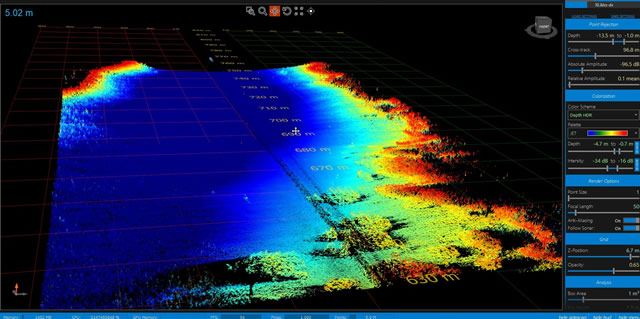
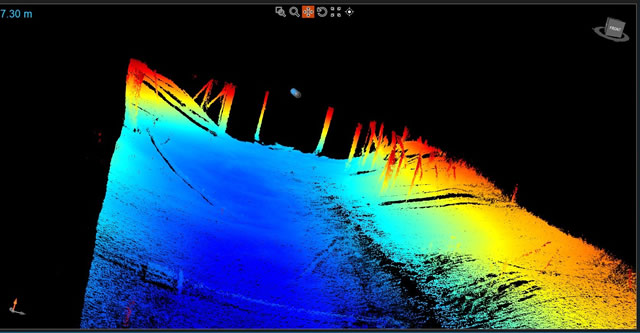
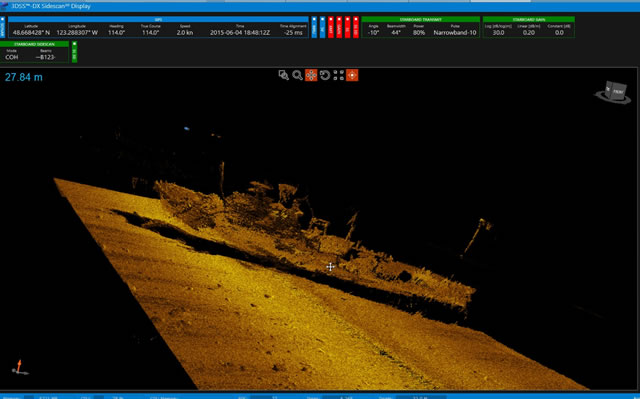
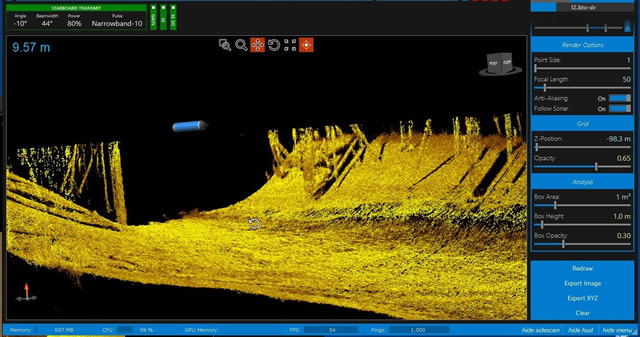
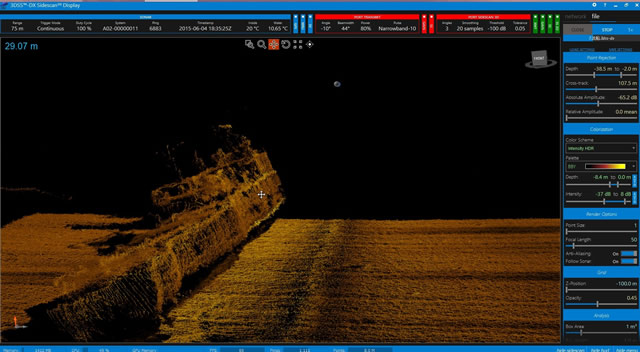
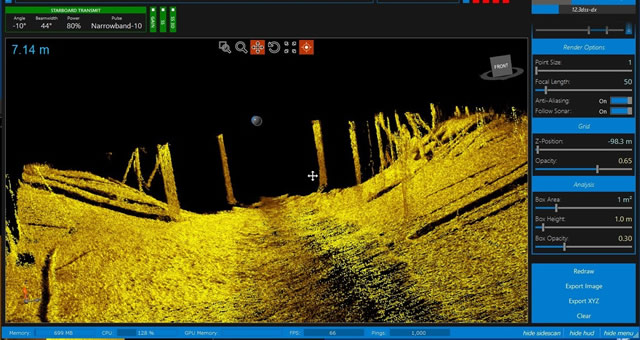
3D SideScan
3DSS Multi Angle Swath Bathymetry Sonarは、片側8素子のアレイを使用し海底反射音の位相差を計測するところまでは他の機器と同じですが、3DSS Multi Angle Swath Bathymetry Sonarはそれら複数アレイで計測した位相差をCAATI(キャッティ)アルゴリズムという特許を使って同じレンジ(距離)から同時に受信した反射信号の到達角度を最大7点まで計測する事が出来ます。
そのため、海底反射と水中構造物が同じレンジ(距離)にある場合でも、それぞれのターゲットの水深および反射強度を漏れなく正確に取得する事が出来ます。
3DSS Multi Angle Swath Bathymetry Sonarは、スワス方向のサイドスキャン画像の1点毎に到達角度を持っている(=水深情報がある)ため、反射強度の画像を3Dイメージで正しく描画する事が出来るようになりました。

仕様/SPECIFICATION
| Sonar Model | 3DSS-DX-450 |
Sonar Specifications | |
| Operating Frequency | 450 kHz |
| Transmit Waveforms | CW, Broadband |
| Pulse Lengths | 10 - 700 cycles |
| Dynamic Range | 108 dB |
| Time Varying Gain Method | Digital |
| Horizontal Beamwidth (2 way) | 0.4° |
| Vertical Beamwidth (selectable) | 15°- 90° |
| Fixed Transducer Tilt | 20° |
| Electronic Transmit Tilt | -45°to 45° |
| Max. Ping Rep. Rate | ~30 Hz |
2D Sidescan Specifications Per Side | |
| Data Output | 32 bit floating point backscatter amplitude and range |
| Typical 2D Imaging Range | 5 to 10 times sonar altitude per side depending on sound profile and bottom type |
| Max Range | 200 m |
| Max Range Resolution | 1.67 cm |
3D Sidescan (Bathymetry and 3D Imagery) Specifications Per Side | |
| Data Output | 32 bit floating point range, elevation angle, and amplitude |
| Typical Bathymetry Range | 3 to 6 times sonar altitude per side, depending on sound profile and bottom type |
| Max Range | 100 m |
| Max Range Resolution | 1.67 cm |
| Bathymetry Accuracy | Bottom type and range dependant |
Integrated MRU Specifications | |
| Pitch Range, Res., Rep., Acc. | ±90°, < 0.05°, < 0.2°, 0.5°@ 25°C |
| Roll Range, Res., Rep., Acc. | ±180°, < 0.05°, < 0.2°, 0.5°@ 25°C |
| Heading Rng,Res.,Rep., Acc.2 | ±180°, < 0.05°, < 0.5°, 2° @ 25°C |
| Motion Sensor Output Rate | 100 Hz |
Interface Specifications | |
| Control Input / Data Output | Gigabit Ethernet, standalone software providing sonar control GUI and TCP data server |
| Time Reference3 | Topside PC, optional external PPS via RS-485 interface |
| External MRU Input3 | RS-485 interface, NMEA protocol (not available on -DXT option) |
| GPS Input3 | RS-485 interface, NMEA protocol (not available on -DXT option) |
| External Trigger Input3 | RS-485 signal level rising-edge trigger initiates ping (not available on -DXT option) |
| External Trigger Output3 | RS-485 signal level output mirrors internal receive window (not available on -DXT option) |
| Computer Requirements4 | PC (Dual Core, 2.4GHz, 4GB), MS Windows 7-64 bit, .NET 4.0, MSVS C++ 2010 Redistrib. |
Physical Specifications | |
| Voltage Requirements | 24 VDC +/- 10% |
| Power Consumption | 12 W (not including transmit power) |
| Length | 56.8 cm (22.35”) (-DXT, -DXO length TBD) |
| Diameter | 9.8 cm (3.88”) |
| Weight in Air, Water | 8 kg (17.6 lbs), 4.7 kg (10.3 lbs) (-DXT, -DXO weight TBD) |
| Pole Mount Adapter Diameter | 1.49” (fits standard thickwall 1.5” I.D. Aluminum pipe) |
| Ambient Operating Temp. | -5° C - 45° C |
| Depth Rating | 100 m (-DXT Depth Rating TBD) |

- NORBIT Multi Beam Sonar System
- NORBIT Wing Head
- 3DSS-Multi Angle Swath Bathymetry Sonar
- 3DSS News & Topics
- Echologger RS900
- サイドスキャンソナー/HMS1400
- Bubble Gun System
- QPS/QINSy Qimera 他
- 小型多項目センサー/RBR
- 超音波流速計/ACM PLUS
- 超小型多項目センサー/DST
- 潮位モニタリングシステム
- 溶存酸素計/D-Opto
- 水中音響測位装置/USBL
- Doppler Velocity Logs (DVL)
- LUMA 250LP
- LUMA 500ER
- OTTER™
- REMUSシリーズ (AUV)
- Visual Plankton Recorder (VPR)
- 水中コネクター
- ハイドロフォン/トランスデューサ
- 水位・波動計測システム
- Disk-Drive Thruster







株式会社エス・イー・エイ(Science Engineering Associates Corporation)
〒279-0043 千葉県浦安市富士見3-16-3 TEL:(+81)047-350-1251 FAX:(+81)047-350-1259
Copyright © SEA Corporation All Rights Reserved.