



NORBIT社正規総代理店
Ping DSP社正規総代理店


マルチビーム測深器(NORBIT)、AUV、超音波ドップラー式多層流向流速計(ADCP)等の海洋観測機器、測定機器及び部品の輸入販売、保守、サービス、ソフト開発、コンサルティング。

OTTER™
Unmanned Surface Vehicle[USV]

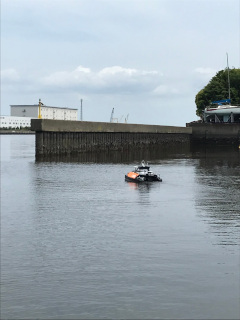
Maritime Robotics社製『OTTER』は、予め作成した航路を自動で航行する、自律航行無人ボート(USV:Unmanned Surface Vehicle)です。
NORBIT社製マルチビームソナーiWBMS、LiDAR、PingDSP社製インターフェロメトリーソナー 3D-SSなどの機器が搭載可能です。
『OTTER』の船体は双胴船タイプのため単胴船タイプより安定して航行させる事ができます。

仕様
- 長さ 200cm、幅 108cm、高さ 106.5cm
- 重量 80kg(ソナー有り、バッテリー2個時)
- 最大船速 ソナーなし:6knot ソナーあり:4.5knot
- WiFi,4G,AIS receiver
- Dual electrical fixed thrusters
- 915whリチウムバッテリー2個標準(最大4個搭載可)
アプリケーション
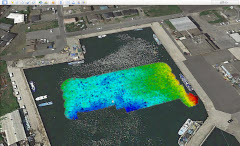
- マルチビーム測深(PingDSP社3D-SS IF搭載可能)
- ダム、湖沼、河川、港湾などの調査
- LiDAR測量
- ADCP調査
- 港湾警備
Vehicle Control Station[VCS]
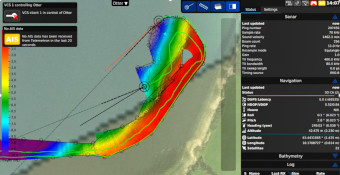
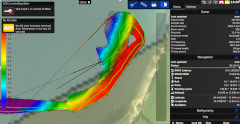
VCSは、OTTERの制御を行うコントロールソフトウェアです。
計画測線(航行経路の設定)、航行中のモニタリングを行います。
WiFi接続のため、リアルタイムでスワス幅、パラメータ、取得データの品質を確認することができます。
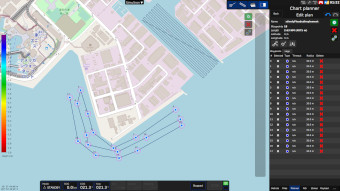
ミッション作成(計画測線)
ユーザは、VCSにある地図上にOTTERが航走するコースを自由に設定する事が出来ます。マウスのクリックでウェイポイント(WP)を決め複雑な地形でも楽にコースを決められます。 芝刈り型の調整も簡単に設定できます。 また、OTTERが航走中もコースを追加したり、方向を変えたりする事も可能です。
スマートフォン APP操作
スマートフォンでOTTERの航行をコントロールするアプリケーションです。
調査終了後、OTTERを回収地点まで移動する場合などに便利です。


動力・バッテリー
OTTERは、2つの強力な電気モーターを使用しています。
バッテリーは標準で915whリチウムバッテリー2個が含まれます。
追加で2個、計4個搭載する事が可能です。
| 駆動時間 | 28hours@1kn |
| 20hours@2kn | |
| 9hours@3kn |
※with NORBIT iWBMS@80w、4Batteries

分割・運搬
OTTERは右図までは工具なしで分割する事が出来ますが、ワンボックスタイプの車であればそのまま積み込む事が出来ます。


計測までの流れ
運搬

ワンボックスカーであればOTTERを組んだまま搭載し現場まで移動。
前日にバッテリーの充電、ミッションの作成をする事でさらに時間の節約。
動作確認 ~30分程度

OTTERを起動させ、制御用PCとWiFiで接続し動作確認します。
ヘディングアライメント(GAMS) 5~15分程度

予め作成したヘディングアライメント用のミッションを使用すればユーザーは、5~15分程アライメントが終了するのを待つだけ。
計測
アライメント終了後、作成したミッションを開始させます。
データ回収・解析
計測が終了したらOTTERからデータをダウンロードし解析します。
Photo





- NORBIT Multi Beam Sonar System
- NORBIT Wing Head
- 3DSS-Multi Angle Swath Bathymetry Sonar
- Echologger RS900
- サイドスキャンソナー/HMS1400
- Bubble Gun System
- QPS/QINSy Qimera 他
- 小型多項目センサー/RBR
- 超音波流速計/ACM PLUS
- 超小型多項目センサー/DST
- 潮位モニタリングシステム
- 溶存酸素計/D-Opto
- 水中音響測位装置/USBL
- Doppler Velocity Logs (DVL)
- LUMA 250LP
- LUMA 500ER
- OTTER™
- REMUSシリーズ (AUV)
- Visual Plankton Recorder (VPR)
- 水中コネクター
- ハイドロフォン/トランスデューサ
- 水位・波動計測システム
- Disk-Drive Thruster







株式会社エス・イー・エイ(Science Engineering Associates Corporation)
〒279-0043 千葉県浦安市富士見3-16-3 TEL:(+81)047-350-1251 FAX:(+81)047-350-1259
Copyright © SEA Corporation All Rights Reserved.