



NORBIT社正規総代理店
Ping DSP社正規総代理店


マルチビーム測深器(NORBIT)、AUV、超音波ドップラー式多層流向流速計(ADCP)等の海洋観測機器、測定機器及び部品の輸入販売、保守、サービス、ソフト開発、コンサルティング。

REMUS100
REMUSシリーズ
![]()
![]()
New Generation REMUS 100は、業界初の高度な技術と機能を備えており、ミッション中にユーザーが自律性と創造性を向上できるようにします。迅速な展開のために設計されたマンポータブルAUVは、ヘリコプターで簡単に輸送でき、ドックまたはあらゆる船舶から投入できます。最大動作深度は100メートル、ミッション期間は最大12時間、迅速で後方業務の少ない展開に最適です。

特徴
小型軽量
レイマスは小型軽量であるため(32kg)、運搬・投入・回収はすべて人力のみで行えます。
ミッション・オペレーションのために大型船や特別な設備を必要としません。
輸送コストを抑えて迅速に輸送できます。
信頼性
業界トップの実績を誇るREMUS 100は、米海軍艦隊が機雷対策のために選択した最も多産なコンパクトAUVです。 このシステムは、10年以上の継続的な製品開発と数千時間のフィールド操作を誇り、現在世界で約300台が利用されています。
操作性
レイマスのオペレーションは驚くほど簡単です。
直感的に扱えるGUI(グラフィカル・ユーザー・インタフェース)は、数日のトレーニングを経て誰にでもオペレーションが行えるように配慮しています。
オペレーションには特別な知識を必要としません。
装備
REMUS 100には標準センサーの一式が含まれており、新しいセンサーが継続的に採用されています。
仕様
| 直径 | 19cm |
| 長さ | 170cm~ |
| 空中重量 | 36kg~ |
| トリム重量 | 1kg |
| 最大深度 | 100m(標準) |
| 電池 | 1.5kwh 充電式リチウムイオンバッテリー |
| 航続時間 | 1.5m/s(3ノット)で12時間 ただしセンサー構成により変動 |
| 推進力 | 直流ブラシレスモーター直結駆動、三枚プロペラ |
| 速度レンジ | 0m/s から 2.6m/s(0~5ノット) |
| 制御 | 2連縦横フィン |
| 起動 | マグネットスイッチ |
| 外部接続 | 2ピン:イーサネット、給電&バッテリーの充電 4ピン:シリアルコネクター |
| ナビゲーション | LBL(Long Base Line)、DVL推定航法、慣性航法(INS)、GPS |
| トランスポンダ | 2台付属 周波数 20-30 kHz |
| トラッキング | 緊急トランスポンダ、ミッション中止、インミッショントラッキング |
| センサー | 標準: コンパス、GPS、フェーズドアレイDVL、CTセンサー、LBL航法、音響通信、ソフトウェア(VIP)、航走体架台、運搬ケース 環境調査用オプション:蛍光光度/後方散乱センサー、高速応答CTセンサー、溶存酸素センサー、乱流計 画像オプション:単周波/2周波サイドスキャンソナー、測深サイドスキャンソナー、ビデオカメラレコーダー&ライトバー、下方ソナー 通信オプション:Wi-Fi通信、Iridium通信 |
| ソフトウェア | GUIベースのノート型PC対応ソフトウェア (ミッションプログラム、トレーニング、ミッションの分析、文書化、メンテナンス・トラブルシューティングデータ出力及びHTML報告書作成、Matlab及びASCIIデータ出力) |
各センサー、オプション説明


ビデオカメラレコーダー(オプション)
REMUS100は、下向きにビデオカメラを搭載する事ができます。
紛失物の捜査、環境調査等使用する事ができます。

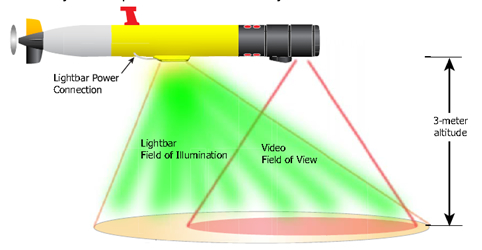
ライトバー
ビデオカメラ撮影の補助をします。視界の悪い海域での撮影に威力を発揮します。
イメージ図

対地速度計DVL
標準の対地速度計は、1200kHzDVLですが、エクスプローラDVL600kHz(オプション)にする事で最大海底探知深度を65mにする事ができます。

WetLab社製 クロロフィルセンサー
環境センサーとしてクロロフィルセンサーや酸素センサー等を搭載する事ができます。

Hovering
Hovering機能を搭載する事で設定した場所でのホバーリングを行いターゲットを精密に調査する事ができます。

Wi-Fi
Wi-Fi機能を搭載する事で有線でのデータのダウンロード、ミッションファイルの送信がなくなります。その為REMUS自体が海面に浮上している状態でデータのダウンロードを行い、次のミッションを送信し、すぐに観測に入れます。
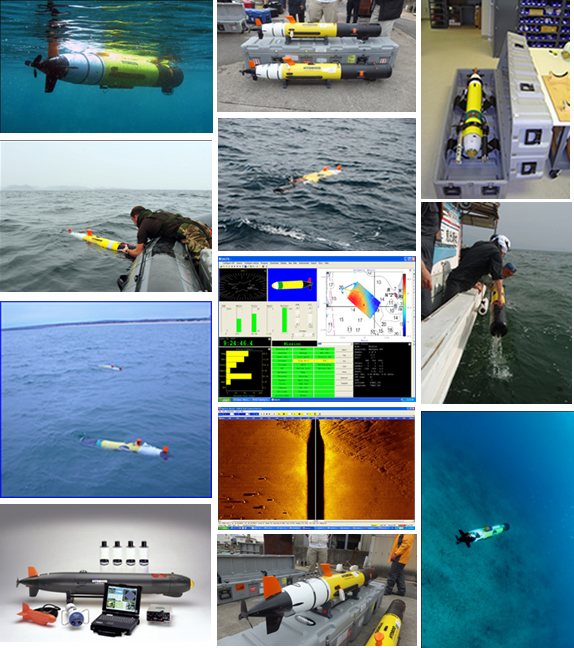
フォトギャラリー

- NORBIT Multi Beam Sonar System
- NORBIT Wing Head
- 3DSS-Multi Angle Swath Bathymetry Sonar
- Echologger RS900
- サイドスキャンソナー/HMS1400
- Bubble Gun System
- QPS/QINSy Qimera 他
- 小型多項目センサー/RBR
- 超音波流速計/ACM PLUS
- 超小型多項目センサー/DST
- 潮位モニタリングシステム
- 溶存酸素計/D-Opto
- 水中音響測位装置/USBL
- Doppler Velocity Logs (DVL)
- LUMA 250LP
- LUMA 500ER
- OTTER™
- REMUSシリーズ (AUV)
- REMUS100
- REMUS600
- REMUS6000
- LARS
- Visual Plankton Recorder (VPR)
- 水中コネクター
- ハイドロフォン/トランスデューサ
- 水位・波動計測システム
- Disk-Drive Thruster







株式会社エス・イー・エイ(Science Engineering Associates Corporation)
〒279-0043 千葉県浦安市富士見3-16-3 TEL:(+81)047-350-1251 FAX:(+81)047-350-1259
Copyright © SEA Corporation All Rights Reserved.